俄罗斯无人机行驶了2500公里:实验揭示了什么?
俄罗斯NPO StarLine公司的无人驾驶实验车在10天内行驶了2500公里。 他从圣彼得堡到喀山的大部分旅程都是以自动驾驶的方式进行,只有在困难的地方才由测试驾驶员控制。

该原型基于Skoda Superb,并配备了具有两种控制模式的第三级自治系统。 第一种模式将汽车保持在车道上,识别标记,交通状况,确定车道并计算路线。 第二种模式仍在定案中,但它将使无人机在可预见的将来在恶劣的天气,没有标记的情况下以及存在大量干扰(例如城市交通)的情况下移动。
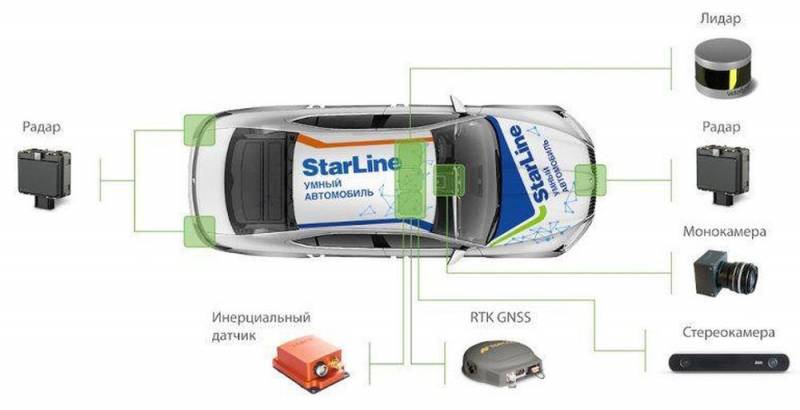
开发人员当前正在使用航路点创建高度精确的地图。 可以使用卫星接收器,惯性导航和里程表确定位置(这是使用驱动器运动数据来估计运动)。 因此,从视觉系统到激光雷达的各种传感器都将帮助无人机移动。 顺便说一下,关于Sphere系统 报道 较早也将派上用场。
顺便说一下,在实验过程中,也发现了缺点。 因此,测试驱动程序确实派上了用场。 确实,在某些地区,无人机根本无法识别道路。 他的计算机系统无法应付大量信息,存在延迟,即她“慢下来”。 但是开发人员已经在积极地解决这些缺陷。

该原型基于Skoda Superb,并配备了具有两种控制模式的第三级自治系统。 第一种模式将汽车保持在车道上,识别标记,交通状况,确定车道并计算路线。 第二种模式仍在定案中,但它将使无人机在可预见的将来在恶劣的天气,没有标记的情况下以及存在大量干扰(例如城市交通)的情况下移动。
开发人员当前正在使用航路点创建高度精确的地图。 可以使用卫星接收器,惯性导航和里程表确定位置(这是使用驱动器运动数据来估计运动)。 因此,从视觉系统到激光雷达的各种传感器都将帮助无人机移动。 顺便说一下,关于Sphere系统 报道 较早也将派上用场。

顺便说一下,在实验过程中,也发现了缺点。 因此,测试驱动程序确实派上了用场。 确实,在某些地区,无人机根本无法识别道路。 他的计算机系统无法应付大量信息,存在延迟,即她“慢下来”。 但是开发人员已经在积极地解决这些缺陷。
信息